
旧版本中SolverSettings是必须保留的,该设置在2023版本中进行了调整,现在可以在模型中删除所有SolverSettings,避免了在仅使用子模型时使用失效的SolverSettings(比如Wizard 数据库)。如果模型中没有激活的SolverSettings,则使用默认设置(与创建新的SolverSetting相同)。但一些系统任务仍然需要SolverSettings,比如联合仿真、线性系统分析、FMI导出、S-function函数导出和DoE分析等工况。
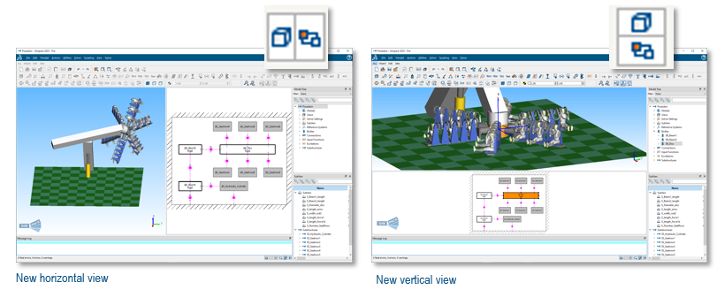
为了进一步方便用户查看模型,现在可以在同一界面中并排显示2D图及3D图。
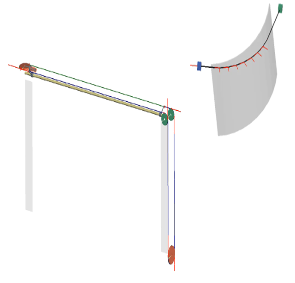
增加了246: Massless Cable力元,可以用于建立基本的开环和闭环的3D 绳索传动机构。对于该绳索力元进行了以下假设:
绳索的接触基于2D投影的方式,该力元在后处理中可对绳索路径的网格、分布式交互作用力及该元件的一些特定结果进行输出,该方法特别适用于大型的绳索传动系统,能够在早期刚性和柔性机构设计中实现预测绳索传动相互作用力、摩擦损失或滑动等分析。
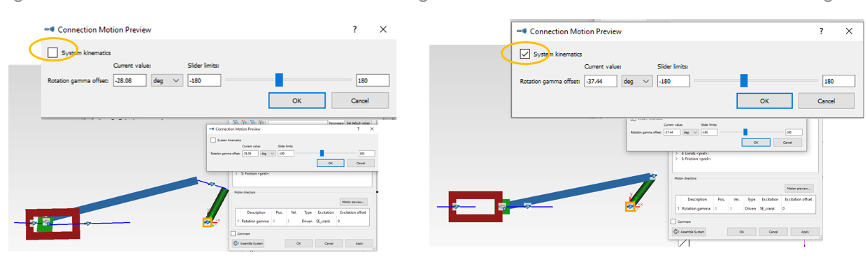
新版本中joint及connection的连接增加了新的“系统运动”的交互模式,使用者执行运动预览或“交互式编辑状态”时可以预览完整的系统的运动。之前版本的交互模式只执行单部件的运动学。
绳索的接触基于2D投影的方式,该力元在后处理中可对绳索路径的网格、分布式交互作用力及该元件的一些特定结果进行输出,该方法特别适用于大型的绳索传动系统,能够在早期刚性和柔性机构设计中实现预测绳索传动相互作用力、摩擦损失或滑动等分析。
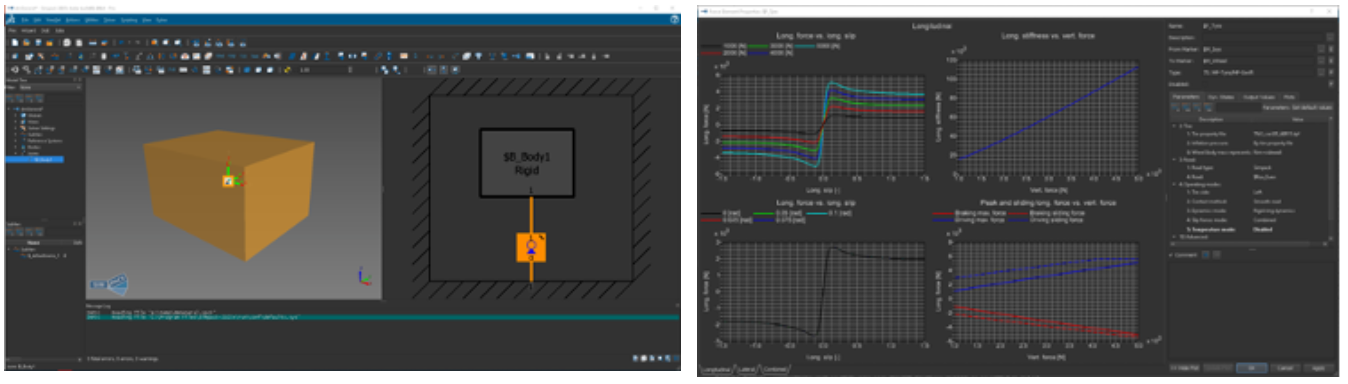
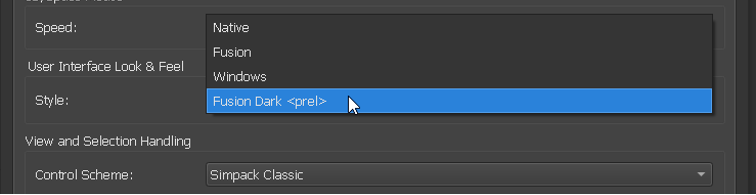
引入了“暗色界面”的主题。该主题适用于在光线昏暗的房间工作或只喜欢较黑色风格的客户。
通过在Options ->Graphics对话框中选择“Fusion Dark <prel>” 选项进行设置。
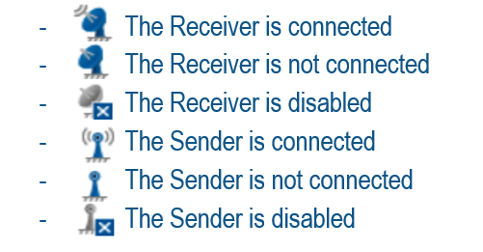
为了帮助用户查看Simpack中哪些Sender和Receiver元件进行了连接,新版本引入了新的图标, 以下模型树图标增强了通信器连接状态的可视化。该更新提高了便利性,不用额外点击打开编辑属性或数据浏览命令就可以检查通讯器的连接状态。
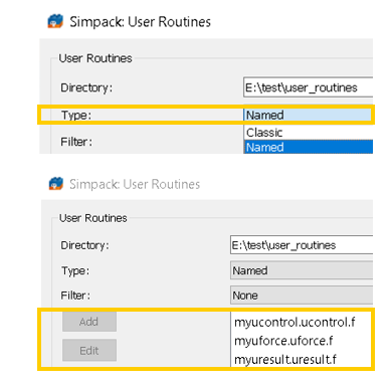
新增的User Routine类型:Named User routine,该类型User Routine可以解决现有User Routine类型存在的一些问题:比如编号冲突/没有足够的可用编号;或使用需要不同User Routine的不同模型时,需要启用正确的User Routine集。
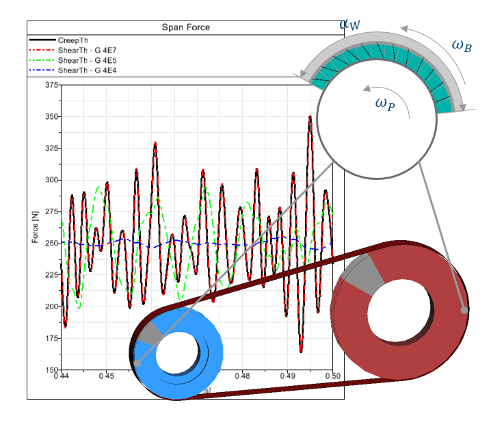
在力元FE 240中新增可以考虑带剪切层弹性的选项,该选项将现有的蠕滑理论拓展至剪切理论,适用于平带传动及V型带传动。能够通过带剪切层的高度和宽度及有效剪切模量G自动导出滑动模型系数。每个皮带轮增加了新的输出参数: 弹性剪切滑移(Elastic shear slip)和利用系数(Utilization factor)。因此能在汽车的传动带分析中考虑到剪切刚度的影响,从而改善纵向动力学。
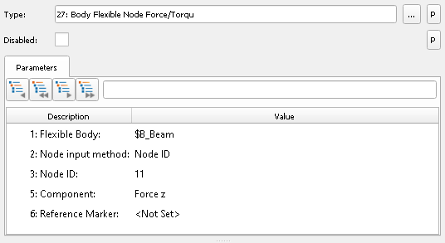
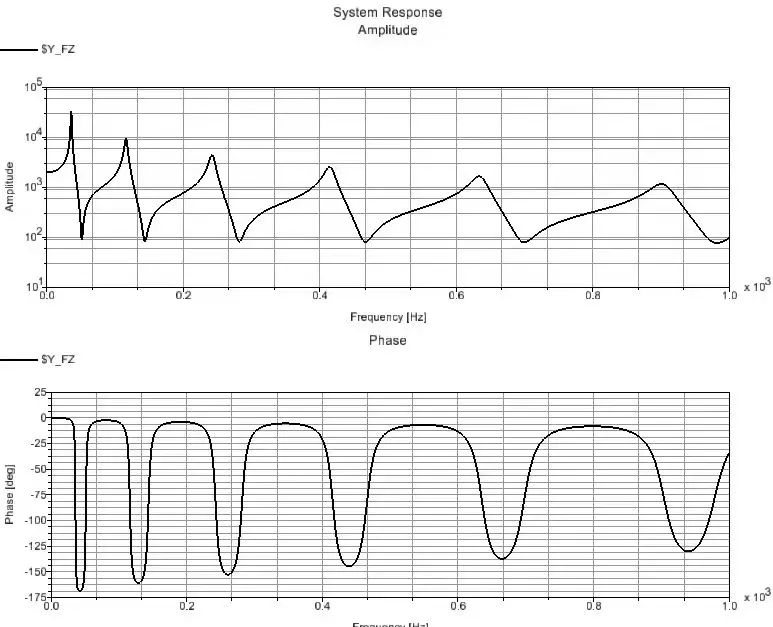
新增的y-output元件27:柔性体节点力/扭矩(Body Flexible Node Force/Torque),能够在线性系统分析(LSA)中获取各方向的节点力和扭矩。其中有两个选项可用:
例如可以利用该功能对柔性体进行NVH分析,可以得到所有柔性体接口位置的传递函数。
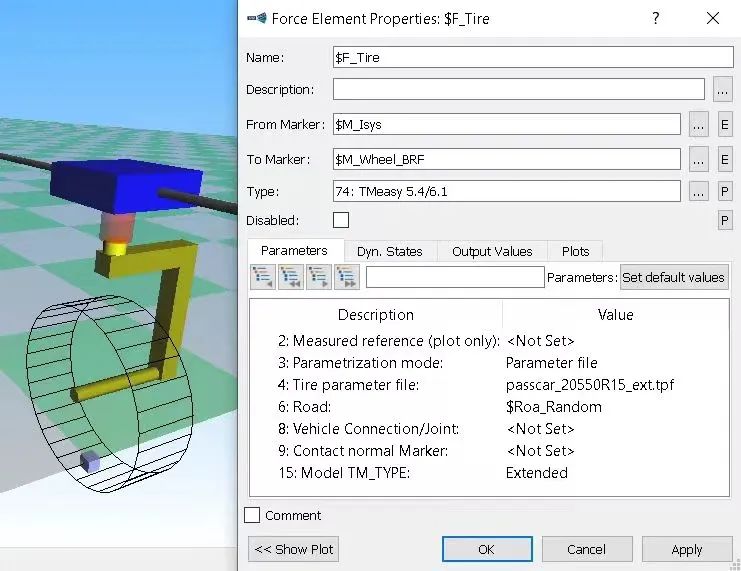
在新版本中,汽车模块中的74号力元TMEasy 5.3.1已经更新至TMEasy 5.4./6.1版本,重点更新内容有:
控制元件CE158‘Susp. Kinemat. Sensor Steering’增加了新的输入参数par(7) ‘Marker on steering wheel’和par(8) ‘Marker on rim’。
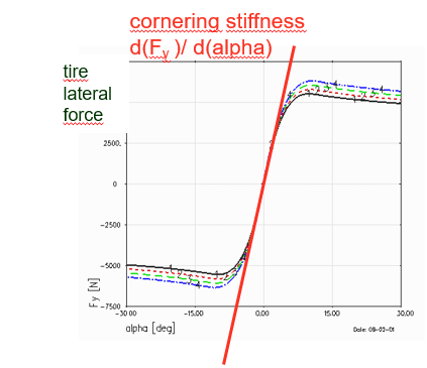
增加轮胎可变侧偏刚度的定义:
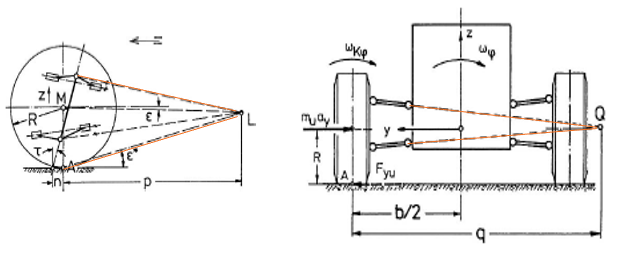
轮胎侧偏刚度是轮胎侧向力与轮胎侧偏角的导数;取决于轮胎垂直载荷和大轮胎横向力的非线性。2022X及之前版本的驾驶员模型中侧偏刚度被视为恒定值,这对于侧向加速度较大接的工况来说精度是不够的。因此在2023的版本中进行了完善。轮胎侧倾刚度现在可以作为车辆横向加速度的函数来定义。该功能显著改善了Simpack驾驶员模型的前馈控制。
轮胎侧偏刚度是轮胎侧向力与轮胎侧偏角的导数;取决于轮胎垂直载荷和大轮胎横向力的非线性。
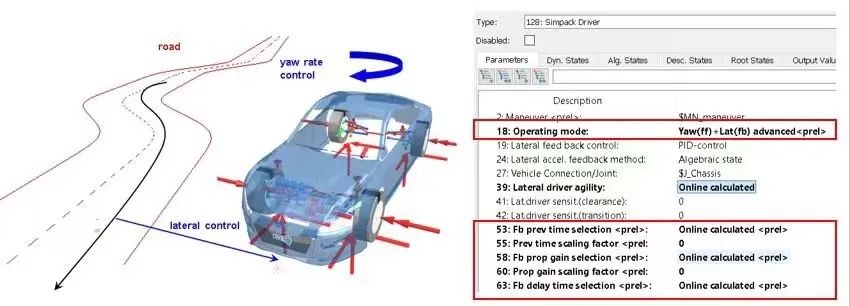
增加了新的驾驶员控制模式
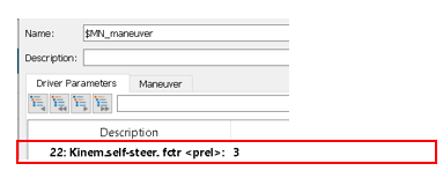
在侧向加速度中增加了自转向系数的功能(Kinematic self-steering factor)
并且增加了新的驾驶员操作模式: Yaw(前馈)+Lateral(反馈) 高级控制。该功能包括:
该模式显著提高了Simpack驾驶员在物理车辆极限下的机动功能。
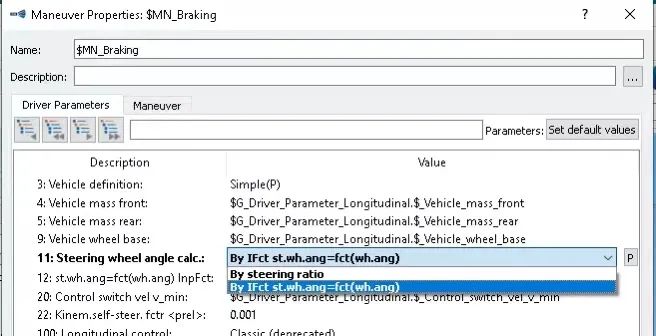
驾驶员模型增加可变传动比的设置
在Simapck的驾驶员模型中的转向传动比输入中新增了可变传动比的输入,为一些受结构限制的车辆模型引入了可改变传动比的场景。通过输入功能可以输入’方向盘转角VS车轮转角’曲线。再通过乘以变化的传动比的形式来计算车轮转角。
控制元件 157 ‘Susp. Kinemat. Sensor Up/Down’ 增加了以下几个新的输出参数:
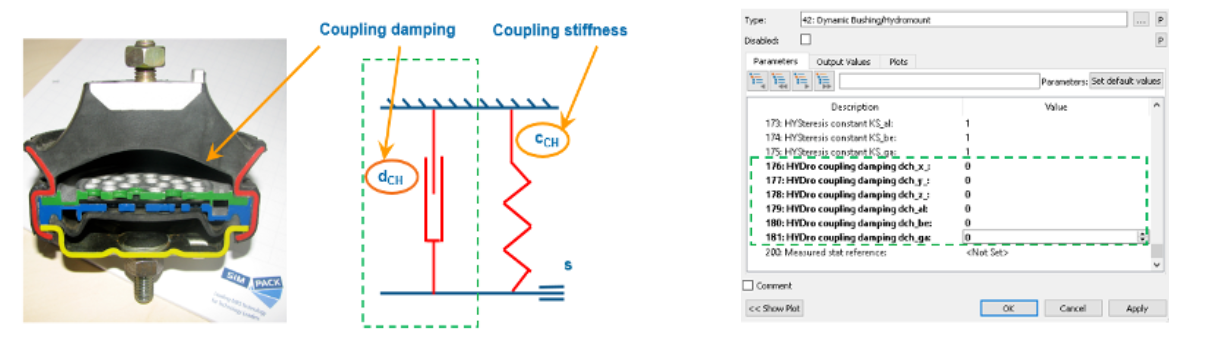
FE42动态衬套在现有的耦合刚度的基础上增加了附加阻尼,进一步提高了模型的真实性。